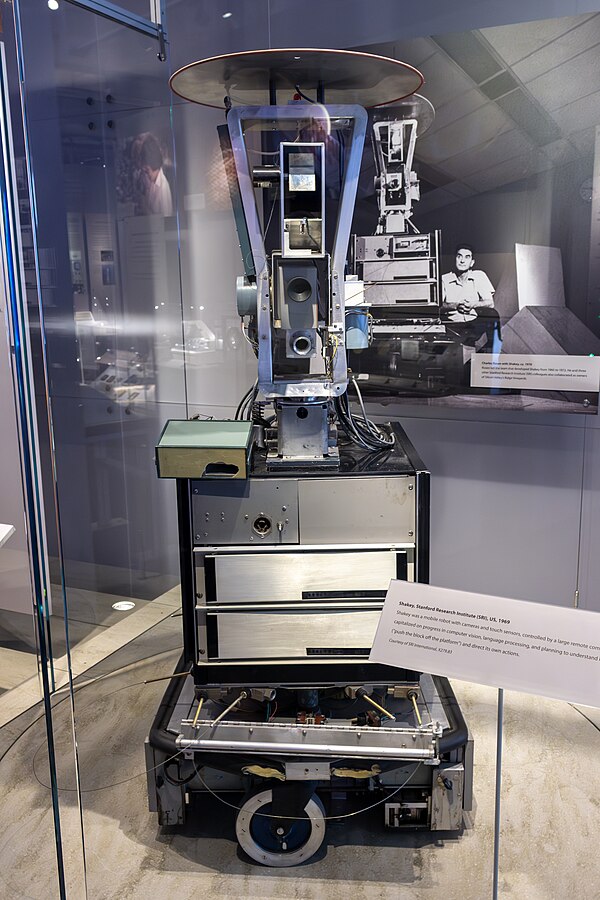
Shakey the Robot
1966–1972SRI International
MobileAIComputer VisionResearch
The first mobile robot to reason about its own actions. Developed at Stanford Research Institute, Shakey combined computer vision, natural language understanding, and logical planning in a single system. It could navigate rooms, push objects, and plan multi-step actions — revolutionary for the era. Shakey introduced the A* search algorithm and the Hough transform, techniques still fundamental to robotics and computer science today. It demonstrated that a machine could perceive the world, build a model, and act on it autonomously. The robot was controlled by an SDS 940 computer connected via radio link.
Relevance for Infinite Machine
Shakey proved that autonomous mobile robots needed to integrate perception, planning, and action — the same core loop every modern robot uses. Its legacy is architectural, not commercial.