SCARA
1981Hiroshi Makino / Yamanashi University
IndustrialAssemblySpeedPrecision
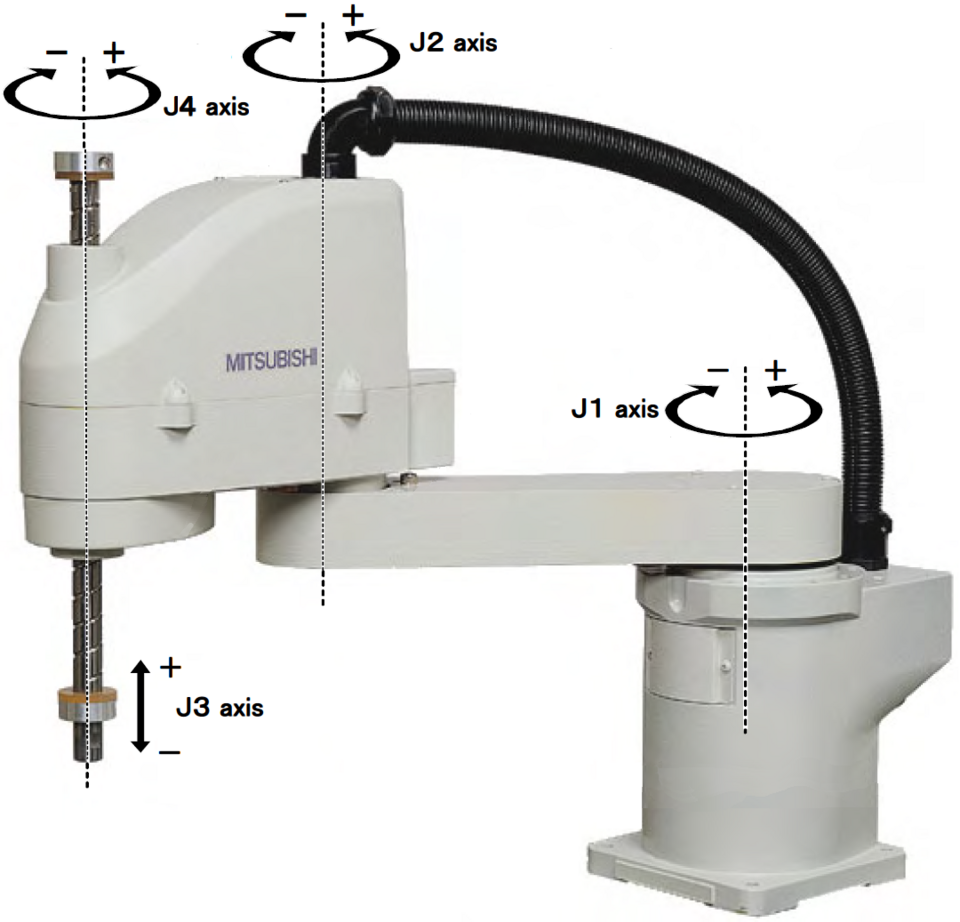
SCARA (Selective Compliance Assembly Robot Arm) revolutionized industrial automation by introducing a robot arm design optimized specifically for pick-and-place and assembly tasks. Invented by Professor Hiroshi Makino at Yamanashi University, the SCARA architecture provides rigidity in the vertical axis (for pressing and inserting) while remaining compliant in the horizontal plane (for alignment). This made it dramatically faster and cheaper for the assembly tasks that dominate manufacturing. SCARA robots became the backbone of electronics assembly worldwide, and variants are still among the most deployed industrial robots today.
Relevance for Infinite Machine
SCARA proved that purpose-built form factors outperform general-purpose ones in specific domains. IM's platform approach can still benefit from this insight — modular payloads should be optimized for their specific task.